Характеристики индуктивного датчика
Индуктивные датчики — это устройства, используемые для обнаружения и измерения магнитного поля. Они широко применяются в различных областях, таких как промышленность, автоматика и контрольно-измерительные системы.
Одной из главных характеристик индуктивного датчика является диапазон измерения. Он определяет максимальное значение магнитного поля, которое может быть обнаружено датчиком. Диапазон измерения может быть разным для разных моделей датчиков и зависит от их конструкции и параметров.
Другой важной характеристикой индуктивного датчика является точность измерений. Эта характеристика описывает, насколько точно датчик может измерить магнитное поле
Точность измерений зависит от качества конструкции датчика, его чувствительности и параметров.
Еще одной характеристикой индуктивных датчиков является скорость реакции. Она описывает, как быстро датчик может обнаружить изменения магнитного поля и передать соответствующий сигнал. Скорость реакции зависит от электронной схемы датчика и его реакции на изменения магнитного поля.
Кроме того, индуктивные датчики могут иметь различные степени защиты от воздействия внешней среды. Например, они могут быть устойчивы к влаге, пыли, вибрации и температурным изменениям. Эта характеристика важна при выборе датчика для определенного применения.
Диапазон действия
Индуктивный датчик является устройством, которое использует изменение индуктивности в зависимости от наличия непроводящего материала вблизи его обмотки. Диапазон действия индуктивного датчика определяется расстоянием, на котором он способен обнаружить наличие объекта.
Диапазон действия индуктивных датчиков может варьироваться в зависимости от их типа и конструктивных особенностей. Например, индуктивные датчики с коротким диапазоном действия обычно имеют высокую чувствительность и способны обнаруживать предметы на расстоянии нескольких миллиметров.
Однако существуют также индуктивные датчики с большим диапазоном действия, которые способны обнаруживать объекты на расстоянии нескольких сантиметров или даже нескольких десятков сантиметров. Такие датчики обычно имеют более низкую чувствительность, но могут быть полезны в тех случаях, когда требуется обнаружение объектов на большом расстоянии.
При выборе индуктивного датчика необходимо учитывать требования к диапазону действия в зависимости от конкретной задачи
Также стоит обратить внимание на другие характеристики датчика, такие как рабочая частота, выходной сигнал и сопротивление обмотки
Погрешности датчиков

Бесконтактный индуктивный датчик
Погрешность снятия показаний контрольной системой существенно влияет на работу бесконтактного индуктивного датчика. Ее общая величина набирается из отдельных ошибок измерений по различным показателям: электромагнитным, температурным, аппаратным, магнитной упругости и многим другим.
Электромагнитная погрешность определяется как случайно проявляющаяся величина. Она появляется из-за паразитной ЭДС, наведенной в катушке внешними магнитными полями. В производственных условиях этот компонент создается силовым оборудованием с рабочей частотой 50 Герц. Температурная погрешность – один из важнейших показателей, поскольку работать большинство датчиков могут лишь в определенном диапазоне температур. Она обязательно учитывается при проектировании устройств этого класса.
Погрешность магнитной упругости вводится как показатель нестабильности деформаций сердечника, возникающей в процессе сборки прибора, а также как тот же фактор, но проявляющийся при его работе. Нестабильности внутренних напряжений в магнитопроводе приводит к ошибкам в обработке выходного сигнала. Погрешность, возникающая в самом чувствительном устройстве, проявляется из-за влияния полевой структуры на коэффициент деформации металлических элементов датчика. Кроме того, на ее суммарное значение существенно влияют люфты и зазоры в подвижных частях конструкции.
Погрешность соединительного кабеля набирается из отклонений величины сопротивления его проводных жил в зависимости от температурного фактора, а также как наводки посторонних электромагнитных полей и ЭДС. Тензометрическая погрешность как случайная величина зависит от качества изготовления намоточных элементов датчика (его катушки, в частности). В различных условиях эксплуатации возможно изменение сопротивления обмотки по постоянному току, приводящее к «плаванию» выходного сигнала. Погрешность старения проявляется вследствие износа подвижных элементов датчика, а также изменения электромагнитных свойств магнитопровода.
Проверить реальную величину этого параметра удается только с помощью сверхточных измерительных приборов
При этом обязательно принимаются во внимание кинематические особенности самого датчика. При проектировании и изготовлении чувствительных элементов такая возможность заранее учитывается в его конструкции
Как проверить индукционный датчик на исправность
 Установка индуктора коленчатого вала Способов проверки существует довольно много, все зависит от навыков автомобилиста и наличия необходимых приборов.
Установка индуктора коленчатого вала Способов проверки существует довольно много, все зависит от навыков автомобилиста и наличия необходимых приборов.
- Наиболее примитивным способом проверки исправности индуктивного датчика является его визуальный осмотр. В процессе осмотра определяется наличие механических повреждений и нарушение изоляции и целостности проводов.
- Второй не менее простой способ заключается в банальной замене тестируемого датчика. Но скажем сразу – способ не лучший и, мало того, что он требует наличия нескольких резервных датчиков, он еще и крайне неточен.
- Если под рукой имеется тестер, то можно проверить датчик и с большой вероятностью сказать, неисправен ли он. Для этого необходимо достать индукционный датчик из посадочного гнезда, соблюдая полярность, подключить к питающим клеммам напряжение от аккумулятора автомобиля. Если длины штатных проводов достаточно, то можно использовать их и не отключать датчик от бортовой сети. Затем отключается сигнальный провод (он обычно имеет маркировку «В») и между ним и корпусом автомобиля подключается вольтметр. Далее, к датчику необходимо несколько раз поднести и убрать металлический предмет, при этом показания вольтметра должны замеряться. Если показания вольтметра не изменились, то датчик необходимо заменить на исправный.
 Осциллограф
Осциллограф
Более сложный способ проверки индукционного датчика при помощи измерительных приборов потребует от автолюбителя хорошего навыка обращения с осциллографом. Для того чтобы определить исправен датчик или нет, необходимо снять его характеристики в процессе работы и сравнить с эталонными. Образцовые характеристики можно найти на сайте производителя датчика. Для съема характеристик осциллограф подключается как и вольтметр, только датчик остается на штатном месте. Потом двигатель автомобиля заводится, и на экране осциллографа появляется искомая характеристика. Если эталонная и измеренная характеристики значительно не совпадают, то датчик необходимо заменить.
Использование 4х измерительных головок позволяет проводить измерение сразу на 4х катушках зажигания и тем самым анализировать сигналы сразу от всех цилиндров двигателя. Так как импульсы зажигания в разных цилиндрах никогда не происходят в один момент, это позволяет суммировать сигналы от всех измерительных головок и получить на выходе один сигнал с серией последовательных импульсов, характеризующих систему зажигания в целом.

Длина сигнальных кабелей выбрана таким образом, чтобы было комфортно работать как с рядными двигателями, так и V-образными, и оппозитными.
В качестве шнура используется мягкий микрофонный кабель с плотной экранирующей оплеткой. Разъем для подключения датчика к осциллографу — BNC.
Корпус датчика изготовлен из полиуретана и надежно защищает чувствительный элемент датчика от возможных механических повреждений.

При разработке датчика особое внимание было уделено местам соединения сигнальных кабелей, как наиболее подверженное повреждениям. Внутри каждого соединения используется печатная плата, на которой располагаются электронные компоненты датчика, а сама плата несет силовую нагрузку, а также надежно крепит кабель. Данные монолитные соединения предотвращают обрыв кабеля при случайном рывке, а также значительно продлевает срок его службы
Данные монолитные соединения предотвращают обрыв кабеля при случайном рывке, а также значительно продлевает срок его службы.

Датчик разрабатывался для использования совместно с мотор-тестером MT Pro, но также может применяться и с любым другим осциллографом, подключается к любому аналоговому каналу.
Индуктивные датчики положения чувствительны к внешнему магнитному полю
Современные автоматы создают больше случайных магнитных полей, чем когда-либо прежде, вызывая проблемы с датчиками Холла и магниторецепторами. Индуктивные датчики положения используют активную демодуляцию, чтобы отфильтровать поля рассеяния (рисунок ниже).
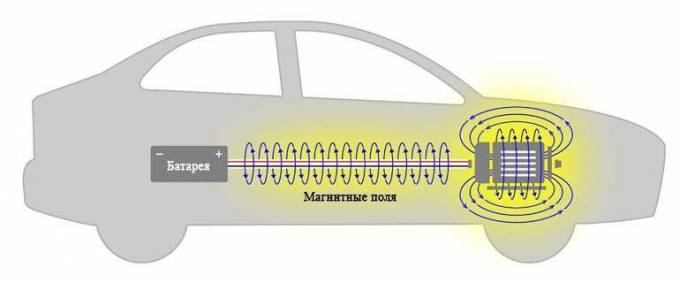
Электромобили следующего поколения могут иметь рабочий ток в несколько сотен ампер, идущих от аккумуляторов к тяговому электродвигателю. Кроме того, большинство автомобилей имеют более трех бесщеточных двигателей постоянного тока (BLDC) для обеспечения движения автомобиля, электронное рулевое управление с усилителем и вспомогательный тормозной двигатель. Все эти системы генерируют магнитные поля рассеяния.
Из-за быстрого нарастания паразитных магнитных полей новые спецификации требуют большего количества испытаний на устойчивость к сильным магнитным полям. В автомобильной промышленности автомобильная электроника в настоящее время подвергается воздействию поля постоянного тока в 4 мТл при оценке электромагнитной совместимости (EMC) и дает ложные показания в любом из критичных для безопасности датчиков — гидроусилитель руля, педаль акселератора, положение тягового электродвигателя.
Прелесть индуктивного определения положения в том, что оно невосприимчиво к этим шумам, потому что оно активно фильтрует только частоту, необходимую для восприятия. Поскольку индуктивные датчики положения не используют магнитный материал, они не воспринимают
магнитное поле постоянного тока. Другими словами, закон Фарадея не работает для статического магнитного поля.
Кроме того, описанный выше синхронный демодулятор отфильтровывает другие частоты выше и ниже основной частоты возбуждения, почти так же, как вы можете выбрать одну радиостанцию AM, когда антенна принимает всю полосу AM. Такой же тип фильтрации невозможен при использовании эффекта Холла и магниторезистивных датчиков.
Погрешности
Погрешности в процессе преобразования диагностических значений оказывают влияние на способности индукционных датчиков выдавать достоверную информацию. К основным из них можно отнести следующие.











Электромагнитная
Данную погрешность принято учитывать только в качестве случайной величины. Как правило, она возникает в ходе индуцирования ЭДС в индукционной катушке в результате внешнего воздействия сторонними магнитными полями. Это происходит в процессе производства из-за силовых электроустройств. Они образуют магнитные поля, что впоследствии и формирует электромагнитную погрешность.
От температуры
Эта погрешность тоже выступает в качестве случайного значения, поскольку работа большого числа элементов индукционного датчика напрямую зависит от температурных показателей, поэтому это ключевая величина, которая даже учитывается в процессе проектировки подобного оборудования.

Магнитной упругости
Обычно такая погрешность может проявляться как следствие нестабильности деформации магнитопровода устройства в процессе сборки самого датчика, а также при деформационных изменениях во время работы. Кроме того, оказываемое нестабильным электронапряжением воздействие на магнитопровод оборудования вызывает снижение качества передаваемого сигнала на выходе.
Деформация элементов
Данная погрешность, как правило, проявляется в результате воздействия измеряющей силы на значение деформации частей индукционного датчика, а также под влиянием усилий, оказываемых на нестабильные деформирующие процессы. Кроме того, не меньшее влияние на нее могут оказывать люфты и зазоры, образовавшиеся в подвижных элементах конструкции устройства.
Кабеля
Такая погрешность обычно проявляется от непостоянного значения сопротивления, в случае деформации самого провода и под влиянием температуры. Также подобным образом может сказаться наводка внешними полями ЭДС в кабеле.
Старение
Данная погрешность может проявляться при износе движущихся элементов самого устройства, а также в случае постоянно изменяющихся магнитных свойств используемого магнитопровода. Ее принято считать, строго говоря, случайным значением. В процессе определения данной погрешности учитывают кинематику конструкции индукционного датчика, а во время проектирования подобного оборудования максимальный эксплуатационный срок рекомендуется определять только при работе в обычном режиме, чтобы при этом износ не успел превысить установленного значения.
Технологии
Погрешности технологии проявляются в случае отклонений от технического процесса производства, при явном разбросе технических параметров катушек и остальных элементов во время сборки, влиянии допущенных зазоров при соединении устройства. Для ее измерения принято использовать механическое измерительное оборудование.
Индукционные датчики следующего поколения
Благодаря новым разработкам в этой области, были созданы усовершенствованные модели индукционных датчиков следующего поколения. Принцип работы остался прежним, однако подверглась тщательной переработке конструкция устройства. В результате датчики теперь оснащаются тонкими платами, распечатанными на 3D-принтерах, и современной цифровой электроникой. Кроме того, их производят на гибких подложках, что избавляет от необходимости использования традиционных кабелей и разъемов. Так что пользоваться устройствами можно даже в тяжелых погодных условиях.
К преимуществам новых разработок можно отнести следующее:
- снижение стоимости и веса, более компактные размеры;
- возможность выбора практически любых форм-факторов;
- повышение точности реагирования на металлические объекты;
- возможность проведения замеров, связанных со сложной геометрией, в двух или трех измерениях;
- упрощение конструкции;
- возможность устанавливать несколько индукционных датчиков близко друг к другу из-за высокой электромагнитной совместимости.
Устройство и принцип действия

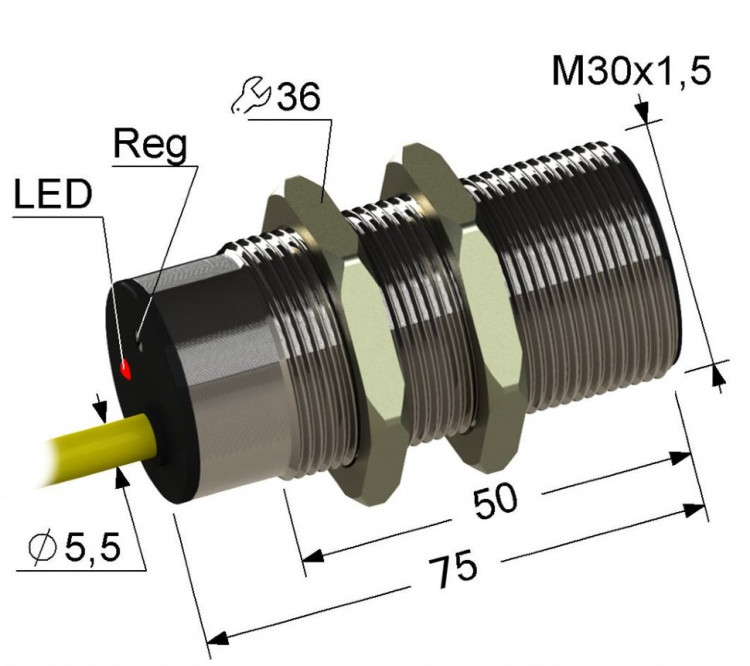
Индуктивный датчик LJ12A3-4-Z/BX (D-12мм)
Индукционные датчики положения, помимо электронного компаратора, содержат в своем составе следующие обязательные компоненты:
- стальной корпус с разъемом для соединительного шнура;
- встроенный чувствительный элемент, регистрирующий на изменения магнитного поля, выполнен в виде стального сердечника с катушкой;
- исполнительный релейный модуль;
- индикатор активации на светодиоде.
Конструкции различных моделей датчиков металла могут иметь некоторые отличия. Они не влияют на сам индукционный датчик, принцип работы его от этого не меняется.

Внутреннее строение индуктивного датчика перемещения
В соответствии с устройством прибора суть его работы описывается следующим образом:
- перемещение металлической части контролируемого объекта приводит к изменению индуктивности чувствительного элемента датчика;
- отклонение объясняется искажением его магнитного поля, следствием которого является изменение параметров электрической схемы и ее активация (светодиод загорается);
- после этого срабатывает электронный модуль и посылает сигнал на исполнительное устройство;
- при поступлении импульса о превышении перемещением допустимого предела выходной (релейный) узел отключает контролируемое оборудование от сети.
Индуктивные датчики. Виды. Устройство. Параметры и применение
Индуктивные датчики – преобразователи параметров. Их работа заключается в изменении индуктивности путем изменения магнитного сопротивления датчика.
Большую популярность индуктивные датчики получили на производстве для измерения перемещений в интервале от 1 микрометра до 20 мм. Индуктивный датчик можно применять для замера уровней жидкости, газообразных веществ, давлений, различных сил. В этих случаях диагностируемый параметр преобразуется чувствительными компонентами в перемещение, далее эта величина поступает на индуктивный преобразователь.

Для замера давления применяются чувствительные элементы. Они играют роль датчиков приближения, предназначенные для выявления разных объектов бесконтактным методом.
Виды и устройство
Индуктивные датчики разделяются по схеме построения на 2 вида:
- Одинарные датчики.
- Дифференциальные датчики.
Первый вид модели имеет одну ветвь измерения, в отличие от дифференциального датчика, у которого две измерительные ветви.
В дифференциальной модели при изменении диагностируемого параметра изменяются индуктивности 2-х катушек. При этом изменение осуществляется на одинаковое значение с противоположным знаком.
Индуктивность катушки вычисляется по формуле: L = WΦ/I
Где W– количество витков; Ф – магнитный поток; I – сила тока, протекающего по катушке. Сила тока взаимосвязана с магнитодвижущей силой следующим отношением: I = Hl/W
Из этой формулы получаем: L = W²/Rm
Где R m = H*L/Ф – магнитное сопротивление.
Работа одинарного датчика заключается в свойстве дросселя, изменять индуктивность при увеличении или уменьшении воздушного промежутка.
Конструкция датчика включает в себя ярмо (1), витки обмотки (2), якорь (3), который фиксируется пружинами. По сопротивлению поступает переменный ток на обмотку. Сила тока в нагрузочной цепи вычисляется:
L – индуктивность датчика, rd – активное дроссельное сопротивление. Оно является постоянной величиной, поэтому изменение силы тока I может осуществляться только путем изменения составляющей индуктивности XL=IRн, зависящей от размера воздушного промежутка δ.
Каждой величине зазора соответствует некоторое значение тока, определяющего падение напряжения на резисторе Rн: Uвых=I*Rн – является сигналом выхода датчика. Можно определить следующую зависимость U вых = f (δ), при одном условии, что зазор очень незначительный и потоки рассеивания можно не учитывать, как и магнитное сопротивление металла Rмжв сравнении с магнитным сопротивлением зазора воздуха Rмв.
Окончательно получается выражение:
На практике активное сопротивление цепи несравнимо ниже индуктивного. Поэтому формула принимает вид:
Из недостатков одинарных можно отметить:
- При эксплуатации датчика на якорь воздействует сила притяжения к сердечнику. Эта сила не уравновешена никакими методами, поэтому она снижает точность функционирования датчика, и вносит некоторый процент погрешности.
- Сила нагрузочного тока зависит от амплитуды напряжения и ее частоты.
- Чтобы измерить перемещение в двух направлениях, нужно установить первоначальное значение зазора, что доставляет определенные неудобства.
Дифференциальные индуктивные датчики объединяют в себе два нереверсивных датчика и изготавливаются в виде некоторой системы, которая состоит из 2-х магнитопроводов, имеющих два отдельных источника напряжения. Для этого чаще всего применяется разделительный трансформатор (5).
Дифференциальные датчики классифицируются по форме сердечника:
- Индуктивные датчики с Ш-образной формой магнитопровода, выполненного в виде листов электротехнической стали. При частоте более 1 килогерца для сердечника используют пермаллой.
- Цилиндрические индуктивные датчики с круглым магнитопроводом.
Форму датчика выбирают в зависимости от конструкции и ее сочетания с механизмом. Использование магнитопровода Ш-образной формы является удобным для сборки катушки и снижения габаритных размеров индуктивного датчика.
Характеристики индуктивных датчиков
Чем отличаются датчики.
Конструкция, вид корпуса
Тут два основных варианта – цилиндрический и прямоугольный. Другие корпуса применяются крайне редко. Материал корпуса – металл (различные сплавы) или пластик.
Расстояние переключения (рабочий зазор)
Это то расстояние до металлической пластины, на котором гарантируется надёжное срабатывание датчика. Для миниатюрных датчиков это расстояние – от 0 до 2 мм, для датчиков диаметром 12 и 18 мм – до 4 и 8 мм, для крупногабаритных датчиков – до 20…30 мм.
Количество проводов для подключения
Подбираемся к схемотехнике.
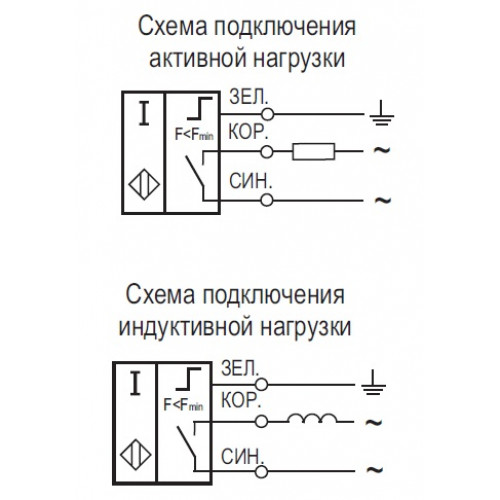
2-проводные. Датчик включается непосредственно в цепь нагрузки (например, катушка пускателя). Так же, как мы включаем дома свет. Удобны при монтаже, но капризны к нагрузке. Плохо работают и при большом, и при маленьком сопротивлении нагрузки.

2-проводный датчик. Схема включения
Нагрузку можно подключать в любой провод, для постоянного напряжения важно соблюдать полярность. Для датчиков, рассчитанных на работу с переменным напряжением – не играет роли ни подключение нагрузки, ни полярность. Можно вообще не думать, как их подключать
Главное – обеспечить ток
Можно вообще не думать, как их подключать. Главное – обеспечить ток.
3-проводные. Наиболее распространены. Есть два провода для питания, и один – для нагрузки. Подробнее расскажу отдельно.
4- и 5-проводные. Такое возможно, если используется два выхода на нагрузку (например, PNP и NPN (транзисторные), или переключающие (реле). Пятый провод – выбор режима работы или состояния выхода.
Виды выходов датчиков по полярности
У всех дискретных датчиков может быть только 3 вида выходов в зависимости от ключевого (выходного) элемента:
Релейный. Тут всё понятно. Реле коммутирует необходимое напряжение либо один из проводов питания. При этом обеспечивается полная гальваническая развязка от схемы питания датчика, что является основным достоинством такой схемы. То есть, независимо от напряжения питания датчика, можно включать/выключать нагрузку с любым напряжением. Используется в основном в крупногабаритных датчиках.









Транзисторный PNP. Это – PNP датчик. На выходе – транзистор PNP, то есть коммутируется “плюсовой” провод. К “минусу” нагрузка подключена постоянно.
Транзисторный NPN. На выходе – транзистор NPN, то есть коммутируется “минусовой”, или нулевой провод. К “плюсу” нагрузка подключена постоянно.
Можно чётко усвоить разницу, понимая принцип действия и схемы включения транзисторов. Поможет такое правило: Куда подключен эмиттер, тот провод и коммутируется. Другой провод подключен к нагрузке постоянно.
Ниже будут даны схемы включения датчиков, на которых будет хорошо видно эти отличия.
Виды датчиков по состоянию выхода (НЗ и НО)
Какой бы ни был датчик, один из основных его параметров – электрическое состояние выхода в тот момент, когда датчик не активирован (на него не производится какое-либо воздействие).
Выход в этот момент может быть включен (на нагрузку подается питание) либо выключен. Соответственно, говорят – нормально закрытый (нормально замкнутый, НЗ) контакт либо нормально открытый (НО) контакт. В иностранной аппаратуре, соответственно – NС и NО.
То есть, главное, что надо знать про транзисторные выходы датчиков – то, что их может быть 4 разновидности, в зависимости от полярности выходного транзистора и от исходного состояния выхода:
- PNP NO
- PNP NC
- NPN NO
- NPN NC
Контакты датчиков также могут быть с задержкой включения или выключения. Про такие контакты также сказано в статье про приставки выдержки времени ПВЛ. А почему датчики, отвечающие за безопасность, должны быть обязательно с НЗ контактами – см. статью про Цепи безопасности в промышленном оборудовании.
Положительная и отрицательная логика работы
Это понятие относится скорее к исполнительным устройствам, которые подключаются к датчикам (контроллеры, реле).
ОТРИЦАТЕЛЬНАЯ или ПОЛОЖИТЕЛЬНАЯ логика относится к уровню напряжения, который активизирует вход.
ОТРИЦАТЕЛЬНАЯ логика: вход контроллера активизируется (логическая “1”) при подключении к ЗЕМЛЕ. Клемму S/S контроллера (общий провод для дискретных входов) при этом необходимо соединить с +24 В=. Отрицательная логика используется для датчиков типа NPN.
ПОЛОЖИТЕЛЬНАЯ логика: вход активизируется при подключении к +24 В=. Клемму контроллера S/S необходимо соединить с ЗЕМЛЕЙ. Используйте положительную логику для датчиков типа PNP. Положительная логика применяется чаще всего.
Продолжение статьи – здесь >>>. Во второй части даны реальные схемы и рассмотрено практическое применение различных типов датчиков с транзисторным выходом.
Индуктивный датчик. Принцип работы и подключение
Датчики
Индуктивный датчик (inductive sensor) – это датчик бесконтактного типа, предназначенный для контроля положения объектов из металла.
Принцип работы
Работа индуктивного датчика основана на взаимодействии магнитного поля катушки, расположенной внутри датчика, и металла, из которого состоит объект.
При приближении металлического объекта (5) к катушке (3), магнитное поле (4) изменяется, что в свою очередь заставляет компаратор (2) сформировать сигнал, который впоследствии поступит на усилитель (1) и далее в цепь управления.
Параметры
Напряжение питания – диапазон напряжения, при котором датчик работает корректно.
Максимальный ток переключения — количество непрерывного тока, которое пропускаясь через датчик, не вызывает повреждение датчика.
Минимальный ток переключения — минимальное значение тока, которое должно протекать через датчик, чтобы гарантировать работу.
Рабочее расстояние (Sn) – максимальное расстояние от поверхности датчика, до квадратного куска железа толщиной 1 мм в осевом направлении. Расстояние будет уменьшаться для других материалов, зависимость Sn от материала представлена в таблице.
Железо | 1 x Sn |
Нержавеющая сталь | 0,9 х Sn |
Латунь — бронза | 0,5 x Sn |
Алюминий | 0,4 x Sn |
Медь | 0,4 x Sn |
Частота переключения — максимальное количество переключений датчика в секунду.
Способ подключения
Способ подключения зависит от типа индуктивного датчика.
Трехпроводные – два вывода отвечают за питание датчика, а третий подключается к нагрузке. В зависимости от структуры (NPN или PNP) нагрузка подключается к положительному (NPN) или отрицательному (PNP) полюсу источника постоянного напряжения.
Четырехпроводные – два вывода питания, два вывода подключаются к нагрузке.
Существуют также двух и пятипроводные датчики, но используются они реже из-за особенностей подключения.
Индуктивный датчик LJ12A3-4-Z/BX
Рассмотрим стандартный датчик, который наиболее часто используется в ЧПУ-станках или 3d-принтерах в качестве концевого выключателя. Датчик имеет 3 вывода и NPN структуру. Размеры датчика 12×50мм, расстояние обнаружения 4мм. Напряжение питания 6-36 В.
На реальном примере продемонстрируем работу датчика. В качестве нагрузки подключаем светодиод с токоограничивающим резистором, а затем подносим металлическую пластину к датчику.
На расстоянии менее 4 мм от пластины, датчик срабатывает и подает напряжение на нагрузку через нормально разомкнутый контакт (NO).
Просмотров:
Мониторинг паропроводов
LOCA (утечка охладителя) описавает аварию с утечкой охлаждающей жидкости в реакторе, причина которой может заключаться в нарушении трубопроводной системы. В худшем случае, можно предположить, что оба конца трубы отрезаны и утечка происходит через двойное сечение трубопровода. Соответственно рассичтывается аварийная охлаждающая система и размер резервной емкости реактора. Дублирующие системы должны быть доступны, поврежденные трубопроводы должны быть перекрыты аварийными клапанами за короткий промежуток времени. Причины аварии могут быть разными, например, землетрясение, крушение самолета или цунами.
Другое возможное явление — это гидроудар, который может произойти в горячих паропроводах при конденсации части насыщенного пара и накопления в трубе из-за недостаточного дренирования, так что неожиданно на определенных участках трубы все поперечное сечение оказывается заполнено водой. Водяной столб ускоряется давлением пара, и происходит удар, похожий на работу поршня цилиндра. Последующие изгибы трубопровода представляют препятствие водяному столбу и его массовой инерции. Давление в сети трубопроводов быстро возрастает и в несколько раз превышает максимальное давление пара и может исчерпать запас проектный прочности трубопровода, приводя к деформации или разрыву трубы.








Мониторинг трубопроводов электростанций
В обоих авариях, LOCA (утечка охладителя) и гидроудар, важно постоянно контролировать важные для безопасности станции элементы, такие как трубопроводы охлаждения и паропроводы перегретого пара, а также, если необходимо, немедленно их перекрывать при помощи аварийных клапанов. Функции берут на себя дублирующие системы. Эффективное предохранительное устройство состоит из установленных датчиков перемещений трубопроводов, построенных по принципу полного индуктивного моста (LVDT)
Индуктивный датчик перемещений передает данные о положении трубопровода в виде сигнала на пульт управления. Кроме того, низкочастотные вибрации трубопроводов могут служить сигналом о возможной аварии. Положение трубопроводов в нескольких различных точках отображается на пульте управления станции. Если результат измерений выходит за предварительно заданные пороговые значения с учетом возможных расчетных перемещений и амплитуды вибраций, подается сигнал тревоги и выполняется установленная аварийная процедура
Эффективное предохранительное устройство состоит из установленных датчиков перемещений трубопроводов, построенных по принципу полного индуктивного моста (LVDT). Индуктивный датчик перемещений передает данные о положении трубопровода в виде сигнала на пульт управления. Кроме того, низкочастотные вибрации трубопроводов могут служить сигналом о возможной аварии. Положение трубопроводов в нескольких различных точках отображается на пульте управления станции. Если результат измерений выходит за предварительно заданные пороговые значения с учетом возможных расчетных перемещений и амплитуды вибраций, подается сигнал тревоги и выполняется установленная аварийная процедура.
Установка индуктивного датчика линейных перемещений для мониторинга паропроводов (измерение положения трубы)
Используются диапазоны измерений индуктивных датчиков линейных перемещений от 100 до 300 мм. Сами датчики должны выдерживать экстремальные условия эксплуатации без ущерба, например, максимальную температуру 180°C, паро-воздушную смесь 100% (относительная влажность) и конденсат 0,5 кг/м³ при температуре 125°C. Датчики eddylab, предназначенные для этой задачи, состоят из цилиндрического корпуса и подвижного штока. Корпус крепится к неподвижной конструкции при помощи струбцин, шток соединяется с трубопроводом. Если паропровод движется вместе со штоком относительно корпуса датчика, выходной сигнал изменяется. Результаты мониторинга в виде непрерывного сигнала положения передаются в систему управления станции.
Внутри датчик состоит из системы катушек (первичная и вторичная) в герметичном корпусе с кольцевыми уплотнениями Viton. Электроника IMCA питает первичную катушку LVDT сигналом на несущей частоте 3 кГц и анализирует дифференциальное напряжение на вторичной катушке по амплитуде и фазе. Преимуществом данной системы является возможность использования длинного кабеля между датчиком и электроникой, так что электроника может находиться в безопасном месте на удалении 100 м и более, в то время как датчик может подвергаться экстремальным условиям на месте установки без проблем.
Устройство и принцип действия индуктивных и емкостных датчиков приближения
Емкостные и индуктивные датчики способны обнаруживать присутствие объекта без непосредственного контакта с ним. При этом индуктивные выключатели чувствительны только к металлическим предметам, а емкостные способны детектировать любые предметы, диэлектрическая проницаемость которых отлична от воздуха (например, воду, дерево, металл, пластик и т.д.). Рассмотрим принцип работы каждого датчика отдельно.
Основным элементом индуктивного датчика является катушка индуктивности (рисунок 2). Она подключена к генератору. Переменное электрическое напряжение на ее выводах вызывает переменное магнитное поле. Линии поля будут перпендикулярны направлению тока в витках катушки.

Рисунок 2 — Принцип работы индуктивного датчика приближения
При отсутствии вблизи катушки металлических объектов линии магнитного поля замыкаются по воздуху. А амплитуда электрических колебаний будет максимальной.
Если же к катушке приближать металлический объект, то все большая часть силовых линий начнет замыкаться через него. Индуктивность катушки начнет увеличиваться. Этот процесс схож с процессом введения сердечника. При этом рост индуктивности приведет к уменьшению амплитуды и/или частоты колебаний.
Если такую систему снабдить детектором, то по изменению амплитуды сигнала можно судить о наличии металлического объекта, его приближении или удалении.
В основе работы емкостного датчика, как следует из названия, положено использование емкостных связей. Сам датчик, по сути, представляет собой одну из обкладок пространственного конденсатора. Второй обкладкой является земля. В качестве диэлектрика выступает преимущественно воздух. Так как диэлектрическая проницаемость воздуха мала (ε=1), то емкость такого конденсатора не велика. Если же к датчику начинает приближаться некоторый объект с более высоким значением ε, то суммарная емкость начнет увеличиваться (рисунок 3).

Рисунок 3 — Принцип работы емкостного датчика приближения
Таким образом, по величине емкости можно судить о наличии объекта, его приближении или удалении. При этом материал объекта может быть практически любым, важным является только значение его диэлектрической проницаемости.
Как правило, для измерения используются схемы с преобразованием емкости в частоту или амплитуду колебаний, которые измеряются с помощью детектора. В итоге, как и в случае с индуктивным датчиком необходимо наличие двух обязательных элементов: генератора и детектора (рисунок 4).

Рисунок 4 — Структурные схемы датчиков приближения
Емкостные и индуктивные выключатели имеют выходной сигнал релейного типа (включен или выключен) (рисунок 5). По этой причине, схема датчиков имеет переключательный элемент — триггер, который для предотвращения ложных срабатываний снабжен гистерезисом.
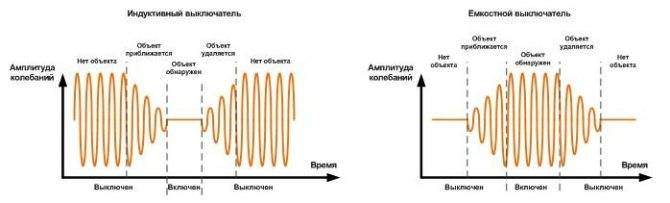
Рисунок 5 — Формирование выходных сигналов выключателей
Рассмотрим основные характеристики бесконтактных выключателей.